- Abstract submission:
August 18, 2017. - Abstract notification:
August 22, 2017. - Workshop: September 28, 2017.
- Location: Rooms 205 and 206
Abstract
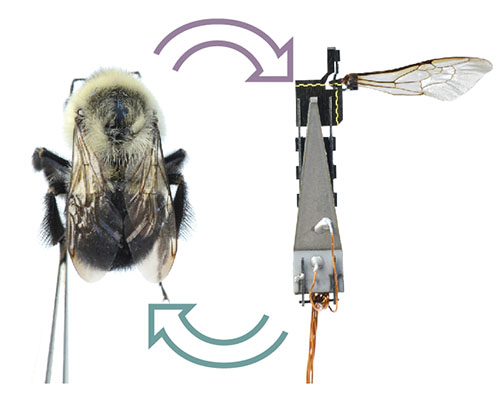
Advances in all aspects of robotics (design, manufacturing, actuation, and controls) have enabled the development of bio-inspired robots that can now achieve some similar functions as their biological counterparts (the Harvard RoboBee, CMU modsnake, RHex, etc). Due to the increasing use of robots as a tool in the scientific process, a large community of biologists use sophisticated robotics hardware and principles to test biological hypotheses in control, actuation, and dynamics of organismal motion. The goal of this workshop is to facilitate interactions between these two communities—bio-inspired roboticists and robotics-enabled biologists. In particular, we hope to identify how roboticists who develop bio-inspired devices may shape new directions of biological inquiry. Furthermore, we want to understand how experiments in organismal locomotion are enabling new concepts for robot design and control. This workshop will address the commonalities and differences underlying these fields through keynote presentations from experts and a panel discussion. The goal of this workshop is to develop an appreciation for the cross-disciplinary roles of scientists and engineers in the future of robotic and biological locomotion research.
This is a full day workshop on the intersections of robotics and biology, being held at IROS 2017. September 28, 2017, Vancouver, B.C., Canada. We are currently accepting 1-page abstracts for poster presentations (see here). Researchers who work in the areas of bio-inspired robotics, robotics-inspired biology, or anywhere in between are encouraged to apply! Due date is August, 18th, notifications by August, 22nd
Organizers
- Nick Gravish, Mechanical and Aerospace Engineering, UCSD
- Chen Li, Mechanical Engineering, Johns Hopkins
- Hamid Marvi, SEMTE, ASU
- Henry Astley, Biomimicry Research and Innovation Center, University of Akron
- Kaushik Jayaram, Harvard Microrobotics Lab, Harvard University
Registration
Registration for full-conference and workshop-only attendees is between $125 and $250 depending on affiliation and date of registration.
Link to registration here
Invited speakers (schedule TBD)
| 9:00 | Welcome and agenda (Nick Gravish) | Website |
| 9:10 | Howie Chosett (CMU) | Website |
| 9:35 | Chen Li (Johns Hopkins) | Website |
| 10:00 | Coffe + posters | |
| 10:30 | Henry Astley (University of Akron) | Website |
| 10:55 | V. Margot Paez (Poster) | |
| 11:00 | Kirstin Petersen (Cornell) | Website |
| 11:25 | Sawyer Fuller (University of Washington) | Website |
| 11:50 | Tom Libby (Poster) | |
| 11:55 | Callie Branyan (Poster) | |
| 12:00 | Lunch | |
| 13:30 | Bo Cheng (Penn State) | Website |
| 13:55 | Zeynep Temel (Harvard) | Website |
| 14:20 | Louis J. Dankovich IV (Poster) | |
| 14:25 | Hamid Marvi (ASU) | Website |
| 14:50 | Aimy Wissa (UIUC) | Website |
| 15:15 | Melanie Anderson (Poster) | |
| 15:20 | Mark Cutkosky (Stanford) | Website |
| 15:45 | Kaushik Jayaram (Closing remarks) | |
| 16:00 | Coffee + poster session | |
| 17:30 | Workshop concludes |